29 dec 2014
Na van alles te hebben getest met de Mini-Tri heb ik besloten een nieuw frame te maken. Reden hiervoor is de “lucht weerstand” die ik heb met de servo en aandrijving van de achterste motor ook al had ik deze al smaller gemaakt.
De verandering welke ik wilde ging niet met het huidige frame en opbouw zoals ik had bij #1. Dus een nieuw aangepast frame tekenen en gefreesd. –> #2
Frame#2 gebouwd met Naze32 als flightcontroller (KK vervangen), motor loopt nu zonder dat de servo in de weg zit.
Hiermee, ondanks de kou, heel wat gevlogen en gekeken wat er anders/beter gemaakt moet worden. De flight controller vliegt eigenlijk goed met de standaard setting van de Naze. Via Autotune deze zelf laten aanpassen en de Mini-Tri vliegt nu al vrij aardig (nog geen FPV).
Ben heel tevreden over frame #2, helaas komt het zwaartepunt niet goed uit in de opbouw welke ik gemaakt heb, natuurlijk betekend dat –>frame #3.

Deze ligt alweer klaar om opgebouwd te worden…
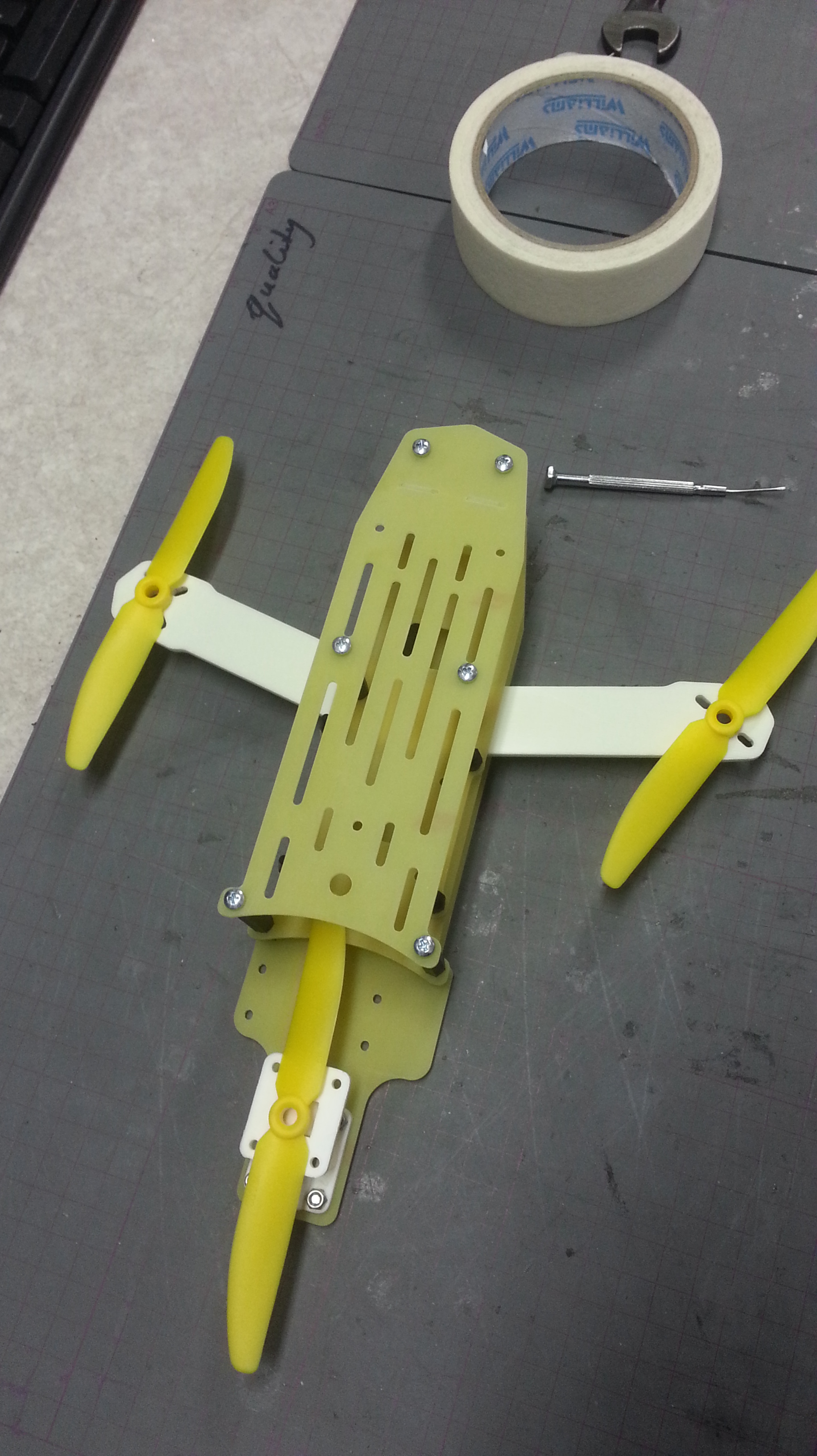
Hier volgen uiteraard de nodige foto’s:










Hier zie je het verschil…
Frame #3 wordt vandaag omgebouwd, updates volgen natuurlijk..
14 dec 2014
De eerste “stapjes”van de Mini-Tri..
De mini-Tri vliegt goed maar moet nog ge-fine-tuned worden. Ergens binnen of wachten op warmer weer 🙂
13 dec 2014
Het koudere, winderige weer heeft de vorderingen aan de Mini-Tri (M3) gestimuleerd… Het testmodel van de Mini-Tri is af.
Setup:
Mini-Tri frame, cobra 2300kV motoren, 5″props, 12A Esc’s, KK2.0 FC, 1300mAh lipo, 5.8 VTX, Sony 600 TVL, mini Servo.

Nadat ik al onderdelen gemonteerd en gesoldeerd heb, meteen getest,


alles werkt en meteen buiten gevlogen (helaas geen beelden, was al donker…) en de nodige afstellingen aan de flight controller gedaan. Na 7 min hoveren/afstellen was de lipo leeg (op de quad gaat deze 5,5 min mee)
De Mini-Tri vliegt zeer strak en draait anders dan een quad, veel soepeler en directer. Wanneer het weer het nog toelaat, morgen het bos in… hij is er klaar voor..
update volgt natuurlijk… met video…
Nu de Taranis zender verder instellen.
7 dec 2014
Sinds een tijdje ben ik bezig om een M3 (mini tricopter) te maken, zie eerdere berichten…
Mijn mini M4 en MiniXL wil ik hier als voorbeeld voor gaan gebruiken.
Aangezien het weer wat minder is, is dit de tijd om het weer eens op te pakken en vandaag heb ik de M3 klaar gefreesd. Meteen ook de Ultrasonic module erin verwerkt. Omdat de M4 zich bewezen heeft als een stevig en makkelijk toestel heb ik de M3 hieruit gemaakt.
De servo aansluiting op de achterste motor heb ik overgenomen van mijn “grote” Tricopter. Gefreesd en in elkaar gebouwd zijn alle delen al, komende tijd ga ik deze verder opbouwen, eerst met een KK2.0 bordje (werking en afstellen hiervan is goed bekend) en misschien na een tijdje met een Naze32.
Tijdens het opbouwen ontdekte ik dat er een foutje in het ontwerp zat en dat de achterste prop IN het model zat
 maar na de tekening te hebben aangepast..
maar na de tekening te hebben aangepast.. 
Nou hier de rest van wat foto’s:






De achterkant wil ik nog aanpassen maar eerst eens kijken hoe dit vliegt… FPV natuurlijk..
wordt vervolgd…

